skid steer robotics Skid-steering mobile robots are widely used because of their simple mechanism . Browse through Kubota's KX080-4 Compact Excavators tractor inventory, .
0 · slope based robot path tracking
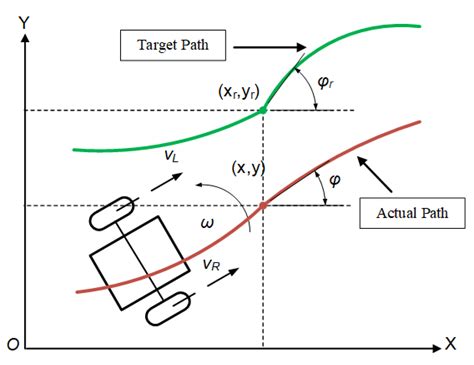
1 · skid steering robot path tracking
2 · skid steered tracking robot
3 · skid steer with side door
4 · jcb skid steer specs
5 · jcb mini skid steer
6 · bobcat jcb
$29K+
Abstract. Recently autonomous ground vehicles have been extensively used due . Skid-steering mobile robots are widely used because of their simple mechanism . Abstract. Recently autonomous ground vehicles have been extensively used due to their effective maneuvering capability in unstructured environments specifically for reconnaissance, agricultural. Skid-steering mobile robots are widely used because of their simple mechanism and robustness. However, due to the complex wheel-ground interactions and the kinematic constraints, it is a challenge to understand the kinematics and dynamics of such a .
Skid-steering mobile robots are widely used because of their simple mechanism and robustness. However, due to the complex wheel-ground interactions and the kinematic constraints, it is a challenge to understand the kinematics and dynamics of such a . Skid-steered mobile robots are often used in outdoor exploration due to their robust mechanical structure and high maneuverability. When they track reference path on a slope with boundaries, ensuring the tracking accuracy and stability of the skid-steered mobile robot is . For wheeled mobile robots (WMRs), one of the prominent and widely used driving schemes is skid steering. Because of mechanical simplicity and high maneuverability particularly in outdoor applications, SSWMR has an advantage over its counterparts.
Skid-steering mobile robots (SSMRs) are quite different from classical wheeled mo-bile robots for which lack of slippage is usu-ally supposed – see for example [3].A Friction-Based Kinematic Model for Skid-Steer Wheeled Mobile Robots. Sadegh Rabiee1 and Joydeep Biswas1. Abstract—Skid-steer drive systems are widely used in mobile robot platforms. Such systems are subject to significant slippage and skidding during normal operation due . To solve these problems, we developed a four-wheel, independently driven skid-steer mobile robot with a damping module for the timing-belt servo system and proposed a model-based coordinated trajectory tracking control method with the timing-belt servo system.
slope based robot path tracking
To demonstrate the LG approach and its versatility and robustness, this paper develops an LG model representation of the dynamics of a four-wheel skid-steer mobile robot and verifies the accuracy by comparing the physical system and existing model provided in a popular robotics simulator (Gazebo). Skid-Steer Wheeled Mobile Robots (SSWMRs) achieve turning motion by rotating one side of the wheels at different revolutions per minute than the other. As a result, they are able to turn in-place which increases their maneuverability. However, this also leads to significant tire skidding and slipping [2]. Abstract. Recently autonomous ground vehicles have been extensively used due to their effective maneuvering capability in unstructured environments specifically for reconnaissance, agricultural.
Skid-steering mobile robots are widely used because of their simple mechanism and robustness. However, due to the complex wheel-ground interactions and the kinematic constraints, it is a challenge to understand the kinematics and dynamics of such a . Skid-steering mobile robots are widely used because of their simple mechanism and robustness. However, due to the complex wheel-ground interactions and the kinematic constraints, it is a challenge to understand the kinematics and dynamics of such a .
all series skid steer tyre
Skid-steered mobile robots are often used in outdoor exploration due to their robust mechanical structure and high maneuverability. When they track reference path on a slope with boundaries, ensuring the tracking accuracy and stability of the skid-steered mobile robot is . For wheeled mobile robots (WMRs), one of the prominent and widely used driving schemes is skid steering. Because of mechanical simplicity and high maneuverability particularly in outdoor applications, SSWMR has an advantage over its counterparts.Skid-steering mobile robots (SSMRs) are quite different from classical wheeled mo-bile robots for which lack of slippage is usu-ally supposed – see for example [3].A Friction-Based Kinematic Model for Skid-Steer Wheeled Mobile Robots. Sadegh Rabiee1 and Joydeep Biswas1. Abstract—Skid-steer drive systems are widely used in mobile robot platforms. Such systems are subject to significant slippage and skidding during normal operation due .
To solve these problems, we developed a four-wheel, independently driven skid-steer mobile robot with a damping module for the timing-belt servo system and proposed a model-based coordinated trajectory tracking control method with the timing-belt servo system. To demonstrate the LG approach and its versatility and robustness, this paper develops an LG model representation of the dynamics of a four-wheel skid-steer mobile robot and verifies the accuracy by comparing the physical system and existing model provided in a popular robotics simulator (Gazebo).
skid steering robot path tracking
affordable skid steer loaders gladbrook ia
alliance 550 radial skid steer tire
Find out the different attachments available for your Toro Dingo, including buckets, forks, platforms, trenchers, augers, grapples, rakes, tillers, cultivators and more. See the features, sizes and prices of each attachment and order online or call Trey Willis at 703 919 5291.
skid steer robotics|slope based robot path tracking