mathematical model skid steer Figure 6 shows a summary of the tests done on marble surface with a symmetric mass distribution. The robot was driven using the speed pairs shown on Fig. 6a, corresponding to the whole motion range of the robot. Figure 6b shows the rotational speed of the robot measured with the IMU as well as the ones . See more Find a wide range of high-quality mini excavator attachments from top brands like Digga, Blue Diamond, and Geith. Enjoy speedy delivery and exceptional customer support on all your mini excavator attachment purchases.
0 · wheeled kinematic model
1 · kinematic model for wheeled platform
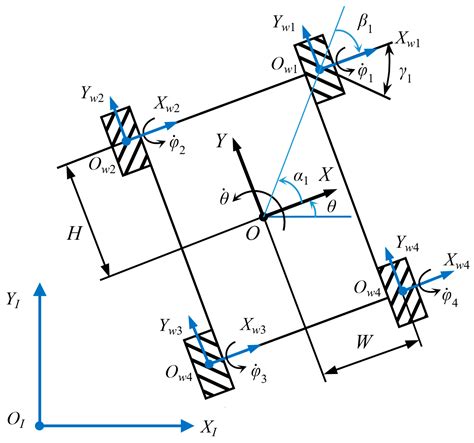
2 · 4 wheel skid steering robot
Massive upside. Built by XCMG means built to take on anything. It’s how we became a world .
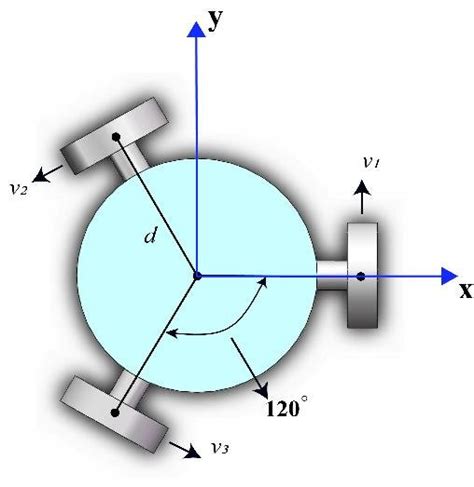
Figure 6 shows a summary of the tests done on marble surface with a symmetric mass distribution. The robot was driven using the speed pairs shown on Fig. 6a, corresponding to the whole motion range of the robot. Figure 6b shows the rotational speed of the robot measured with the IMU as well as the ones . See moreThe kinematic model was validated by adding weights sequentially either to the back (Figs. 4a, 5b, c), or to the sides of the robots (Figs. 4b, 5a), shifting the . See moreIn order to verify the assumption that wheels with more traction have minimum skid steer slip values (\(\Sigma _{SS}\)) Eq. 1 was calculated for the back wheels and . See more
In order to asses the performance of the proposed kinematic model for dead reckoning scenarios indoor tests on a marble surface and outdoor tests both on . See moreA mathematical model of a 4-wheel skid-steering mobile robot is presented in a systematic .In this section kinematic and dynamic model of four-wheel skid-steering mobile robot is .
This article describes an improved kinematic model that takes these factors into account and verifies the model in a variety of working conditions, including different terrains and asymmetric loads, for two different wheeled skid-steered platforms.A mathematical model of a 4-wheel skid-steering mobile robot is presented in a systematic way. The robot is considered as a subsystem consisting of kinematic, dynamic and drive levels.
In this section kinematic and dynamic model of four-wheel skid-steering mobile robot is presented. We refer to the real experimental construction consists of two-wheel differentially driven mobile robots namely MiniTracker 3 (see Fig.1) [9]. In order to simplify the mathematical model of SSMR we assume that [2] plane motion is considered only, • A probabilistic motion model for SSWMRs capable of accurately estimating the distribution of robot positions and velocities in response to tire skid and slip. • A convex optimization formulation to combine the GP outputs from different terrains allowing the motion model to be used for diverse, potentially unseen terrains. To demonstrate the LG approach and its versatility and robustness, this paper develops an LG model representation of the dynamics of a four-wheel skid-steer mobile robot and verifies the accuracy by comparing the physical system and existing model provided in a popular robotics simulator (Gazebo).
wheeled kinematic model
This manuscript presents a comparison of mathematical models and non-complex artificial neural networks in energy prediction tasks for differential and skid-steer drive robots which move over various types of surfaces. In this work a novel method to adaptively identify the friction component of the dynamic model of skid-steered vehicles is proposed. The approach combines terramechanic-based and data driven models as a way to exploit the benefits of both modeling methodologies.Kinematic modeling of skid-steered platforms can be divided into two parts: the first is modeling their straight motion,andthesecondismodelingtheirrotations.Kinematic modeling of straight motion in terms of encoder readings is trivial, and due to reduced susceptibility of skid-steered platforms to slip during straight motion it is relatively mor. The paper introduces mathematical models of a skid steered mobile platform for robotics. The platform consists of a rectangular steel construction with four wheels. Two banks of two drive wheels on each side are linked to two DC .
This manuscript presents a comparison of mathematical models and non-complex artificial neural networks in energy prediction tasks for differential and skid-steer drive robots which move over various types of surfaces. This article describes an improved kinematic model that takes these factors into account and verifies the model in a variety of working conditions, including different terrains and asymmetric loads, for two different wheeled skid-steered platforms.
A mathematical model of a 4-wheel skid-steering mobile robot is presented in a systematic way. The robot is considered as a subsystem consisting of kinematic, dynamic and drive levels.
In this section kinematic and dynamic model of four-wheel skid-steering mobile robot is presented. We refer to the real experimental construction consists of two-wheel differentially driven mobile robots namely MiniTracker 3 (see Fig.1) [9]. In order to simplify the mathematical model of SSMR we assume that [2] plane motion is considered only, • A probabilistic motion model for SSWMRs capable of accurately estimating the distribution of robot positions and velocities in response to tire skid and slip. • A convex optimization formulation to combine the GP outputs from different terrains allowing the motion model to be used for diverse, potentially unseen terrains. To demonstrate the LG approach and its versatility and robustness, this paper develops an LG model representation of the dynamics of a four-wheel skid-steer mobile robot and verifies the accuracy by comparing the physical system and existing model provided in a popular robotics simulator (Gazebo).
This manuscript presents a comparison of mathematical models and non-complex artificial neural networks in energy prediction tasks for differential and skid-steer drive robots which move over various types of surfaces. In this work a novel method to adaptively identify the friction component of the dynamic model of skid-steered vehicles is proposed. The approach combines terramechanic-based and data driven models as a way to exploit the benefits of both modeling methodologies.
Kinematic modeling of skid-steered platforms can be divided into two parts: the first is modeling their straight motion,andthesecondismodelingtheirrotations.Kinematic modeling of straight motion in terms of encoder readings is trivial, and due to reduced susceptibility of skid-steered platforms to slip during straight motion it is relatively mor. The paper introduces mathematical models of a skid steered mobile platform for robotics. The platform consists of a rectangular steel construction with four wheels. Two banks of two drive wheels on each side are linked to two DC .
kinematic model for wheeled platform
kubota skid steer price
kubota 75 skid steer
View updated Bobcat Mini Excavator specs. Compare size, weight and detailed tech specifications for similar Mini Excavator from top manufacturers
mathematical model skid steer|wheeled kinematic model